
Case
Pick-and-Place précis de pralines au chocolat
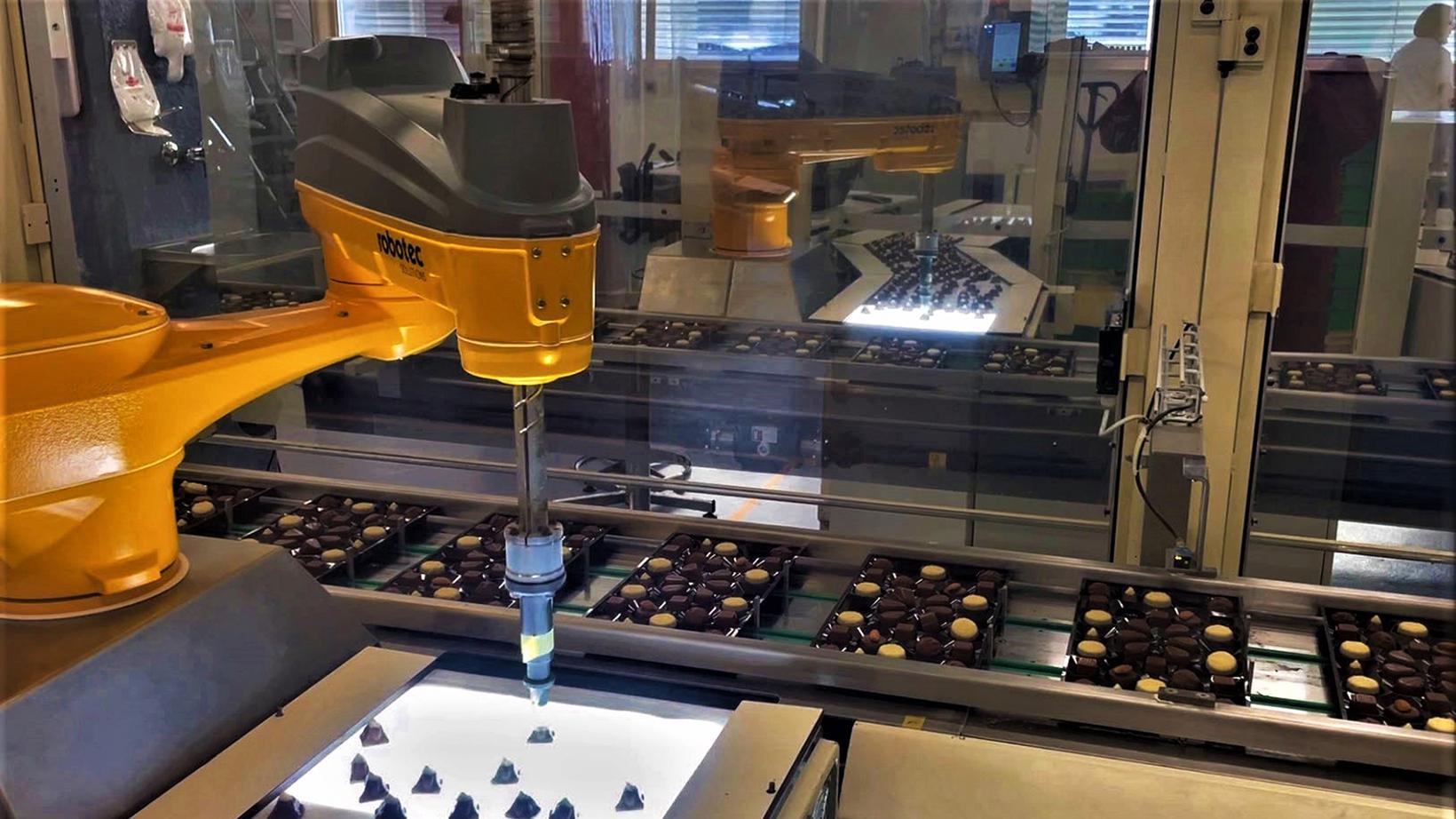
Une nouvelle cellule robotisée avec système de vision et suivi de ligne a permis à Delica d’atteindre un rythme de 70 pralines par minute. Et ce, avec une précision maximale, malgré le positionnement dynamique des pralines dans les blisters directement depuis le convoyeur.
Highlights
Productivité
Cadence augmentée avec succès à 70 pralines par minute
Flexibilité
Système de vision détectant les positions variables des pralines et des blisters
Efficacité
Contrôle précis avec suivi de ligne intégré
Connectivité
Connectivité de tous les systèmes avec Ethernet haute vitesse
Contexte & Objectifs
Delica AG , filiale de Migros Industrie, produit notamment les chocolats FREY. Sur le site de production de Buchs, une ligne d’emballage vieillissante était en service.
Onze robots étaient utilisés pour conditionner les pralines dans différents blisters. L’objectif était maintenant de remplacer les cellules robotisées SCARA existantes par une nouvelle installation capable d’atteindre un rythme plus élevé, jusqu’à 70 pralines par minute.
Un défi résidait dans le fait que le convoyeur d’alimentation des pralines et le convoyeur principal pour le transport des blisters étaient en mouvement continu. Les pralines devaient donc être positionnées dynamiquement dans les blisters en pleine course. Une autre exigence était l’intégration des nouveaux robots dans l’installation existante.
La solution
Les dernières technologies robotiques et Technologie de vision , combinées à un contrôle avec suivi de ligne (Line Tracking), permettent des cycles fluides et très rapides.
Nous avons opté pour une Cellule robotisée avec robot SCARA Stäubli TS2-80 et double suivi de ligne, ainsi qu'un système de vision Cognex. Chaque convoyeur, celui des blisters comme celui d’alimentation des pralines, a été équipé d’un encodeur.
Ainsi, les positions des blisters et des pralines peuvent être suivies avec précision, tandis que la caméra haute résolution Cognex détecte rapidement et exactement la position des pralines. Tous les systèmes sont interconnectés via Ethernet haute vitesse, permettant d’atteindre le rythme requis.



Industrie
Applications
Temps pour votre projet ?
Parlons de votre projet d'automatisation. Je me réjouis de recevoir votre demande par e-mail ou téléphone.

Gwenölé Bergeon
Senior Automation Expert Romandie
La conception et la construction de la technologie d'alimentation/saisie ont requis tout notre savoir-faire en ingénierie. En raison des espaces restreints, un système de préhension astucieux était nécessaire pour exploiter au mieux les degrés de liberté du robot.


