
Case
Chargement et déchargement d'une presse à injection en fonctionnement 3x8
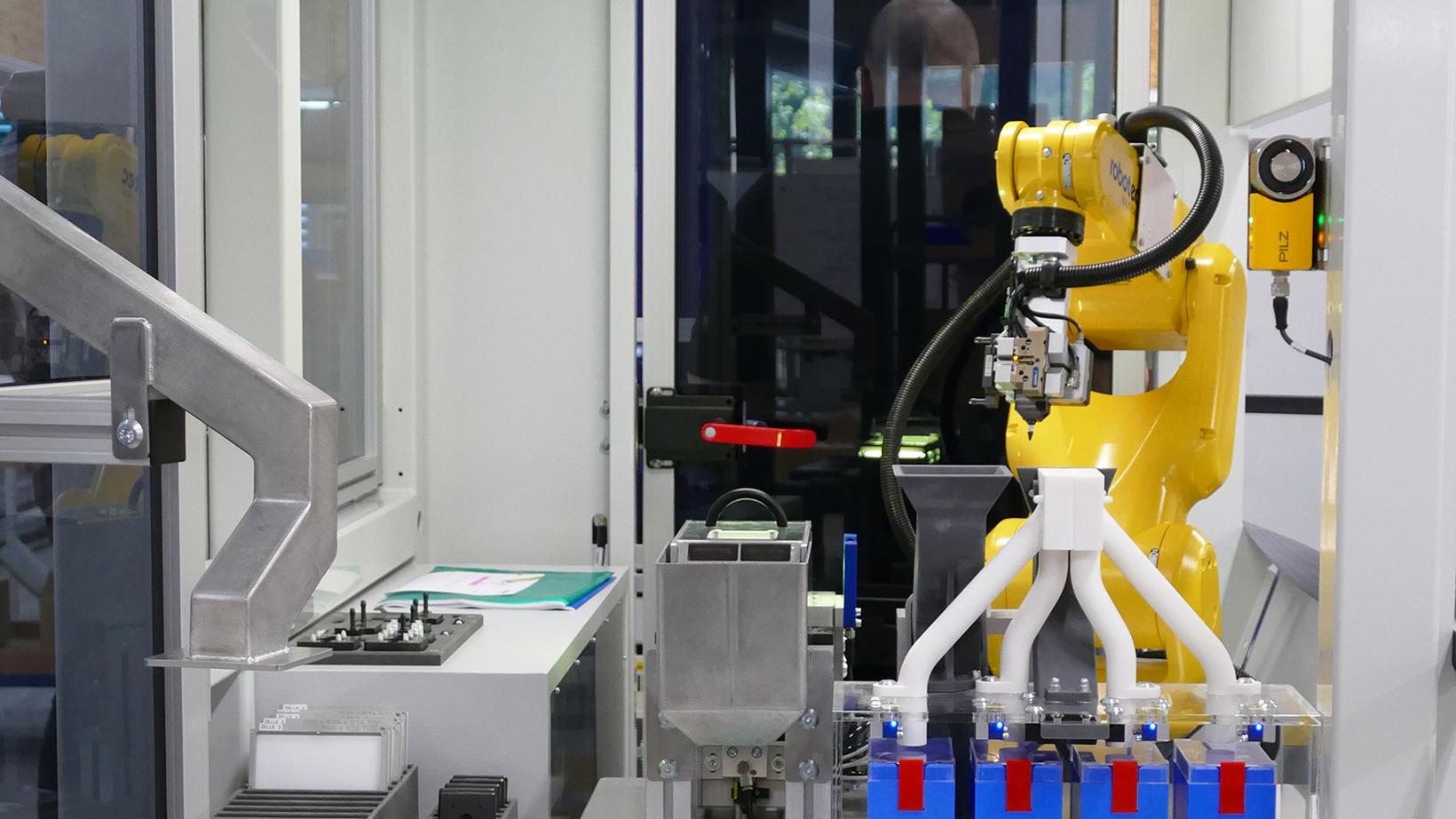
Une cellule robotisée équipée d’un système de vision permet l’exploitation autonome d’une presse à injection en 3×8. Le changement rapide de configuration, même avec une grande variété de pièces, garantit une flexibilité maximale.
Highlights
Productivité
Exploitation autonome en 3 équipes sans intervention d'un opérateur
Flexibilité
Reconfiguration facile pour un autre produit ou pièce de référence
Efficacité
Faible consommation d'énergie grâce à l'utilisation de robots
Utilisabilité
HMI Robotec avec utilisation intuitive via écran tactile
Contexte & Objectifs
Le client est l'un des principaux fournisseurs dans la Fabrication de produits de luxe et d'horlogerie . Depuis plus de 15 ans, l’entreprise fait confiance aux installations Robotec utilisées dans sa production. Face à une demande croissante sur le marché ainsi qu’à l’introduction de nouveaux produits, le client a décidé d’acquérir de nouvelles cellules robotisées afin de garantir la productivité requise de manière économique et efficace.
Le processus à automatiser concernait le chargement et le déchargement d’une presse à injection. Différentes petites pièces métalliques devaient être insérées dans le moule. L’outil à 4 empreintes fabrique quatre pièces toutes les 30 secondes, lesquelles doivent être retirées par le robot et déposées de manière ordonnée selon les cavités. De plus, la carotte d’injection devait également être extraite de façon automatisée.
La solution
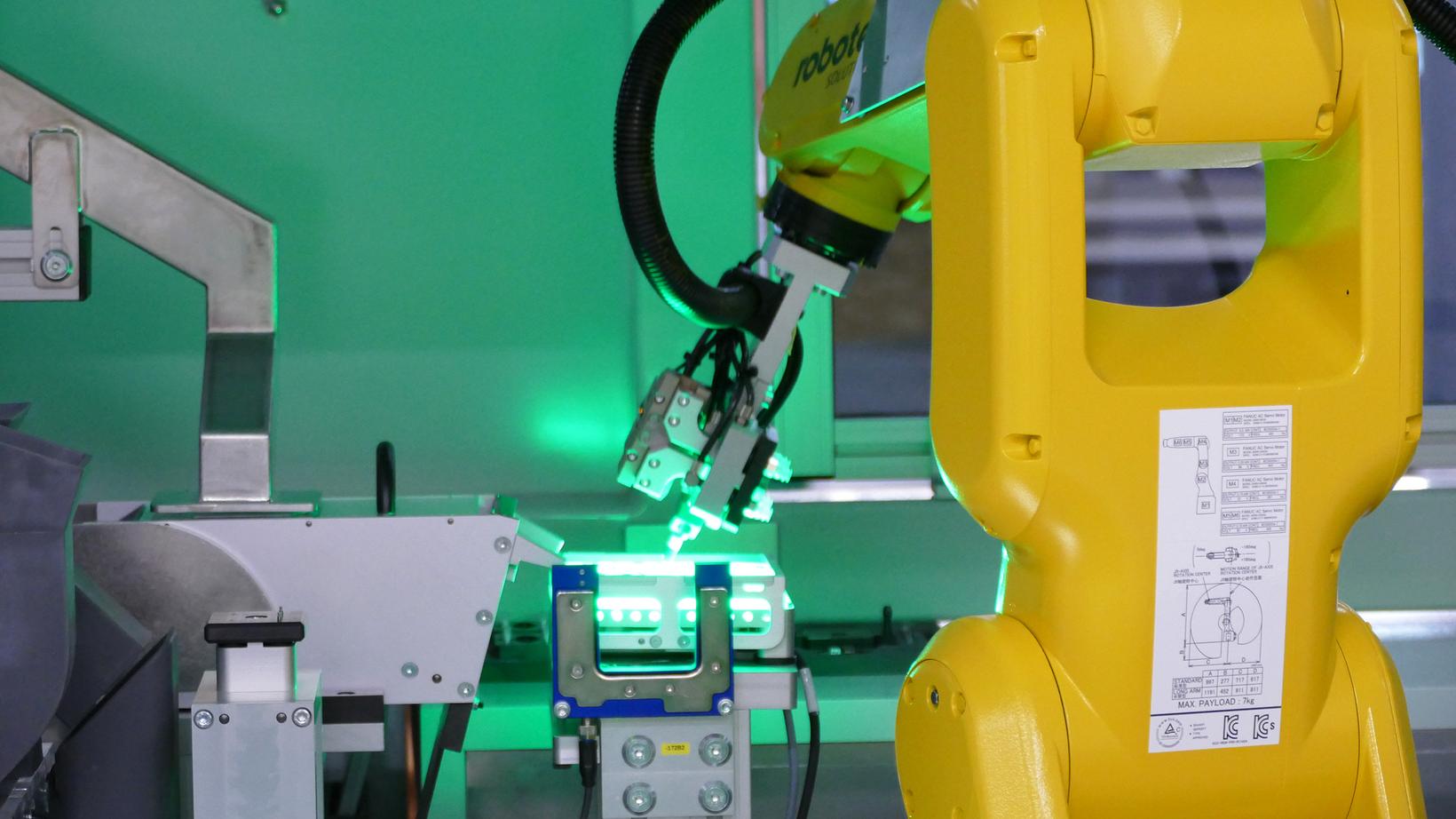
Un système Robotec Feeder assure la séparation des pièces brutes. La caméra de la Solution de vision détermine la position et l’orientation des petites pièces et transmet ces informations au Robot . Celui-ci prépare ensuite individuellement les quatre pièces brutes, les saisit par aspiration et se positionne devant l’outil, en attente de son ouverture. À ce moment, le robot retire les quatre pièces finies ainsi que la carotte, puis insère les quatre nouvelles pièces brutes.
Si le chargement et le déchargement représentent en soi un processus d’automatisation classique, le projet présentait néanmoins plusieurs défis. D’une part, la diversité relativement importante des pièces avec sept références différentes. D’autre part, la séparation des pièces brutes s’est révélée délicate, celles-ci ayant tendance à rouler. S’y ajoutaient des contraintes de cadence rapide et de fonctionnement en 3 équipes, des défis que nous avons relevés avec succès.


Industrie
Applications
Temps pour votre projet ?
Parlons de votre projet d'automatisation. Je me réjouis de votre demande par e-mail ou par téléphone.

Gwenölé Bergeon
Senior Automation Expert Romandie
Grâce à notre expérience avec les préhenseurs robotisés à vision, nous avons développé un système qui garantit une préhension sans marquage des pièces. Ainsi, une manipulation douce des composants délicats est assurée.
Équipe du projet Robotec

Roman Müller
Project Management & Software Engineering

Urs Heimann
Services

Samuel Bürkli
Head of Project Management & Mechanical Engineering

Oliver Guggisberg
Project Management & Control Engineering

Jamie Dubs
Trainee in Mechanical Engineering
