
Case
Depalettieren von neuem Leergut mit Vakuumgreifer
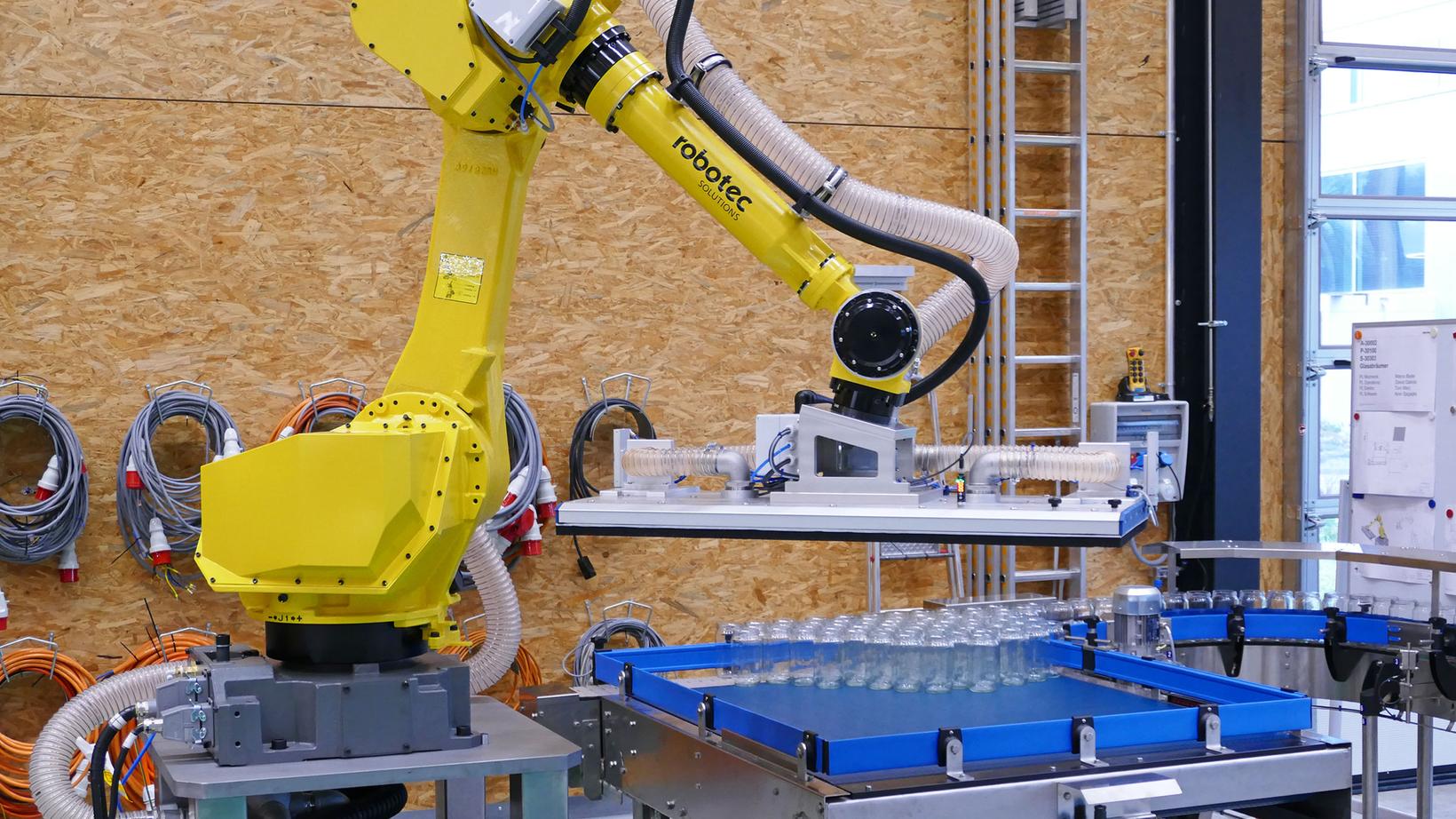
Mit einem Vakuumgreifer sorgt unser Roboter bei Sandro Vanini für ein schnelles Depalettieren des neuen Leerguts. Der sensorgesteuerte Glasabräumer hält so den Mitarbeitenden den Rücken frei für anspruchsvollere Aufgaben.
Highlights
Productivity
Verarbeitet 50 000 Gläser pro Tag
Flexibility
Kompatibel mit 30 Gläser-Varianten
Efficiency
Geringer Stromverbrauch
Safety
Kein manuelles Heben nötig, geschützte Zelle
Ausgangslage & Ziele
Die Feinkost-Produkte des Tessiner Unternehmens Sandro Vanini sind europaweit im Handel erhältlich. Mit einer gezielten Automatisierung sollten die Angestellten entlastet und gleichzeitig die Produktionsmengen gesteigert werden – ohne die traditionellen Methoden zu verdrängen.
Das Depalettieren des neuen Leerguts erwies sich dabei als ideal, um automatisiert zu werden. Denn bisher wurden die Gläser in Handarbeit von Paletten auf den Arbeitstisch umgeladen.
Eine Herausforderung beim Automatisieren dieses Prozesses war die variable Höhe der Lagen, die abzuräumen sind: Denn je nach Ladehöhe der Palette befinden sich die Gläser auf Bodenhöhe oder auf bis zu 2 Metern Höhe. Und die Anlage musste mit rund 30 unterschiedlich hohen Gläsertypen kompatibel sein.
Die Lösung
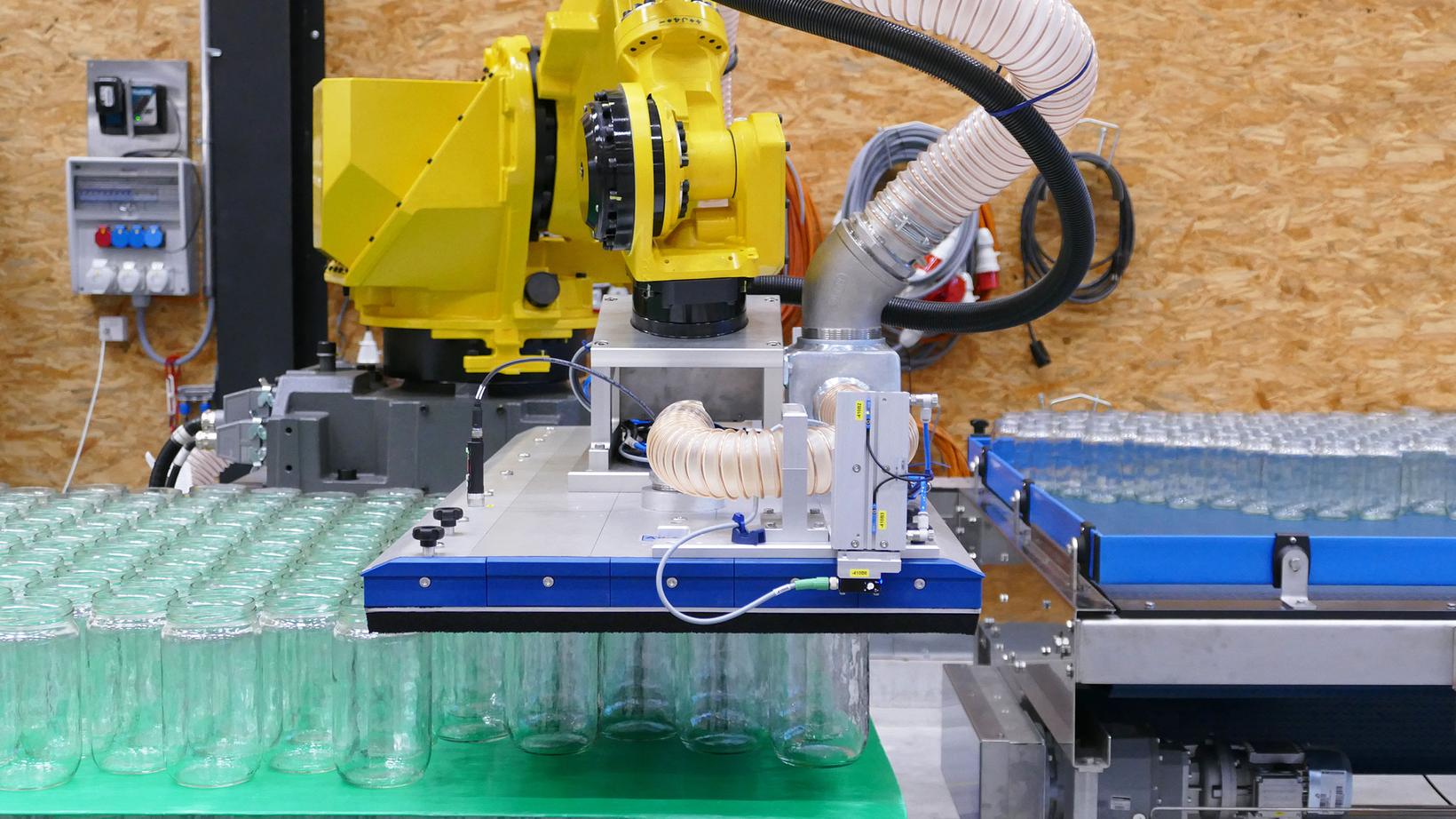
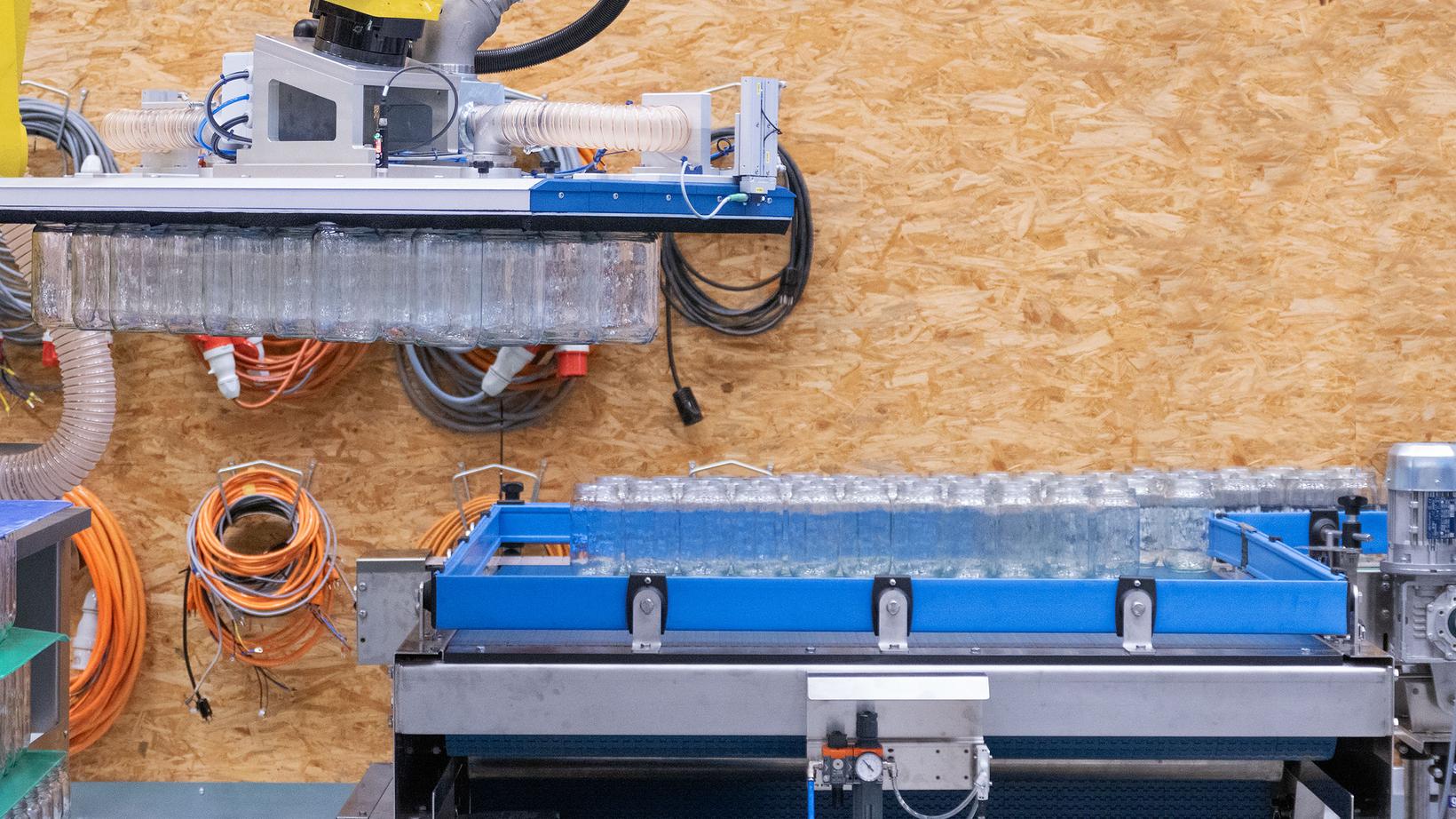
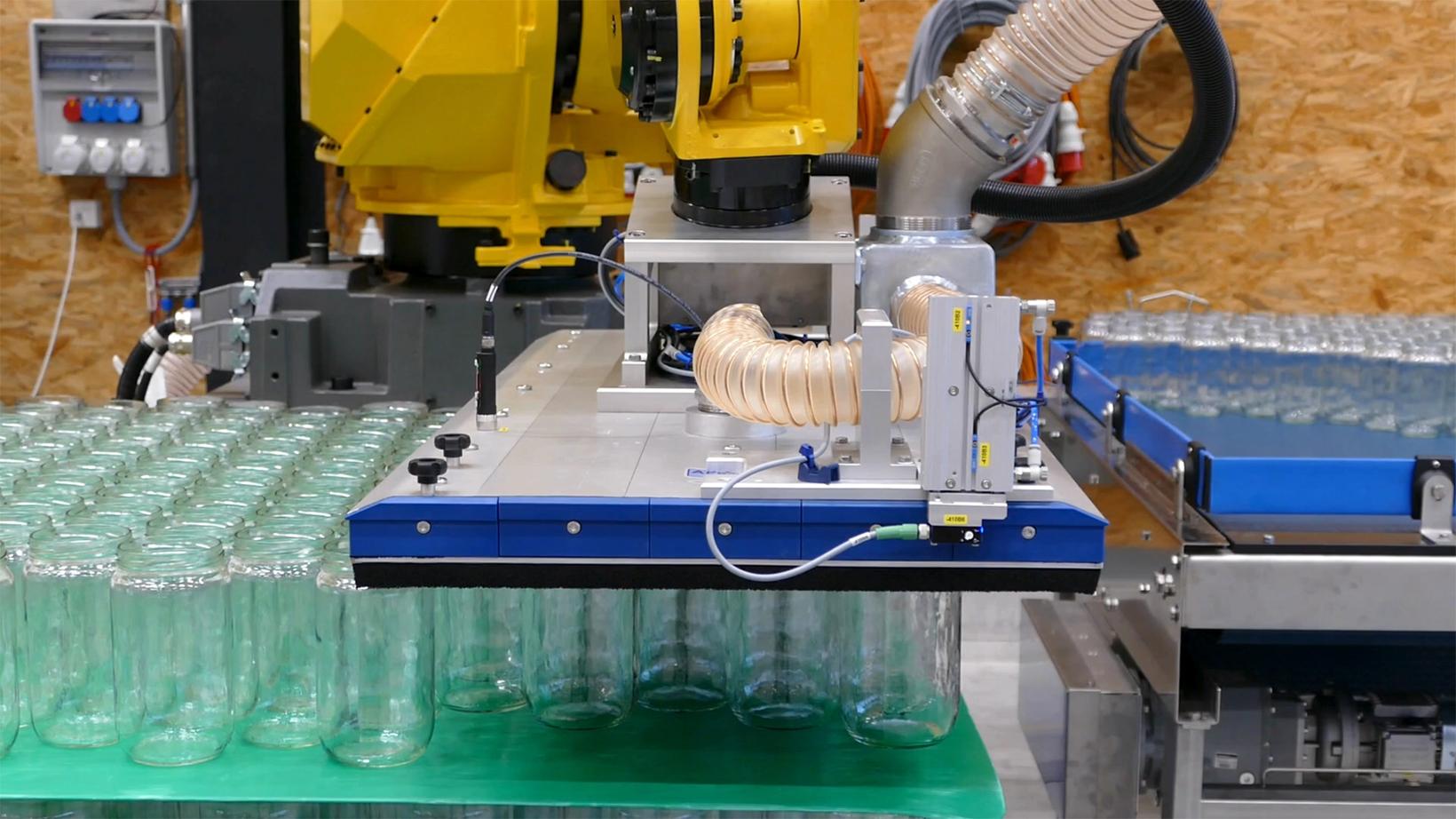
Als Greifer für die Pick-and-Place-Lösung entwickelten wir einen Saugbalken mit Vakuumsystem. Durch seine grosse Saugfläche und die hohe Saugkraft kann dieser rund 100 Gläser – etwa ein Drittel der Palettenfläche – in einem Arbeitsgang abräumen.
Der Greifer der Roboterzelle verfügt ausserdem über eine Suchfunktion, die mittels Sensor die Palettenhöhe abtastet und erkennt, auf welcher Höhe sich die abzuräumenden Gläser befinden. Auch die Kunststoff-Zwischenlagen zum Transportschutz werden vom Greifer automatisch entfernt.
Am Schluss jedes Zyklus setzt der Greifer die Gläser sicher auf dem Förderband ab, das zur Abfüllanlage führt. Schon nach kurzer Zeit hatte sich der Glasabräumer im Arbeitsalltag bewährt und stellte mit über 50’000 Gläsern am Tag erste Rekorde auf.
Branche
Applications
Zeit für Ihr Projekt?
Lassen Sie uns über Ihr Automatisierungsprojekt sprechen. Ich freue mich auf Ihre Anfrage via E-Mail oder Telefon.

Nick Koch
CEO / Senior Automation Expert
Wir führten mehrere Machbarkeitsstudien sowie Testaufbauten und Testläufe bei uns im Haus durch. So stellten wir sicher, dass die Montage und Inbetriebnahme beim Kunden nur 3 Tage dauerte.

