
Case
Exaktes Pick-and-Place von Schokolade-Pralinen
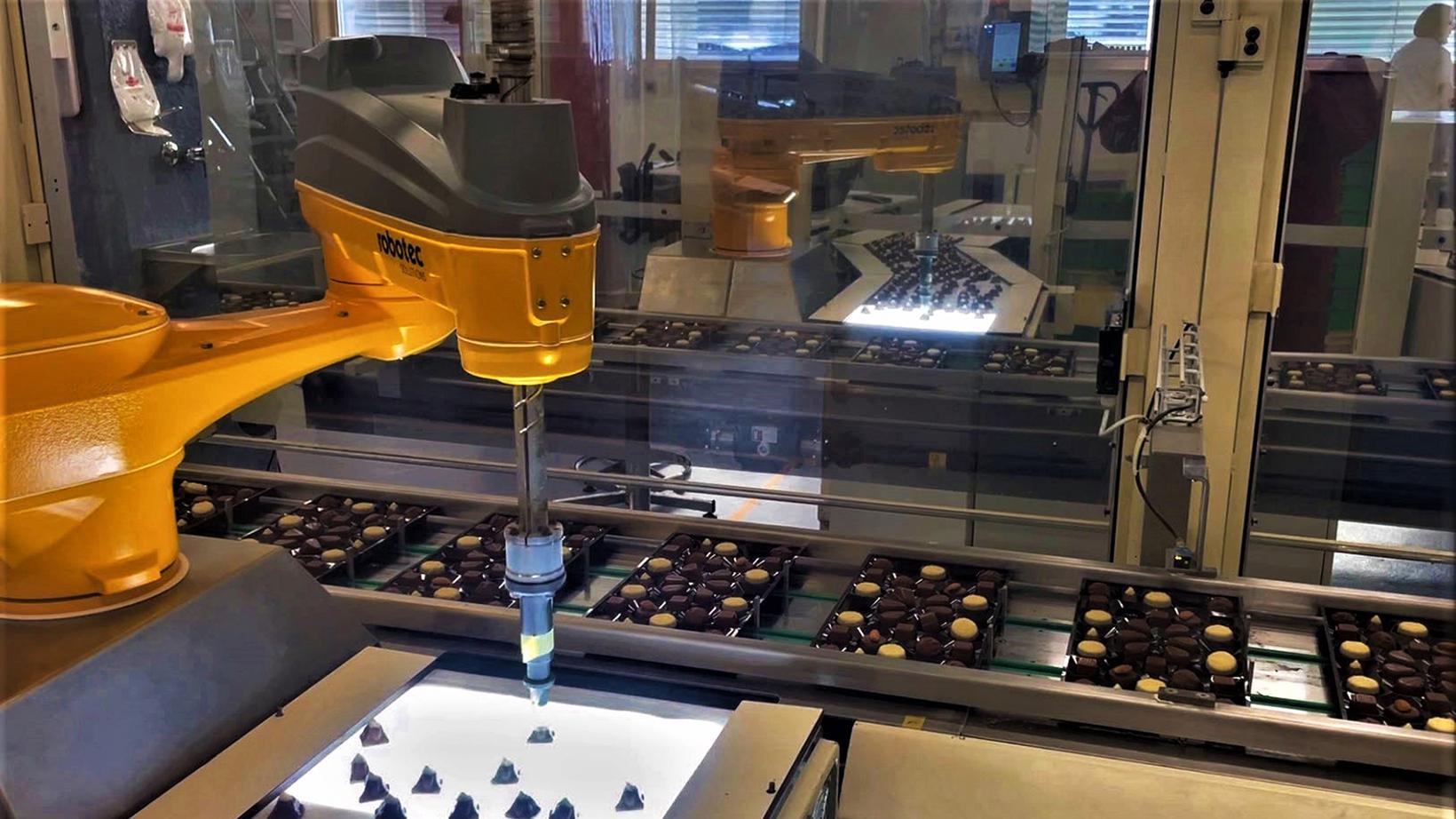
Eine neue Roboterzelle mit Vision-System und Line Tracking erhöhte bei Delica die Taktrate auf 70 Pralinen pro Minute. Und dies in höchster Präzision, obwohl die Pralinen dynamisch ab Band im Blister positioniert werden müssen.
Highlights
Productivity
Taktrate erfolgreich erhöht auf 70 Pralinen pro Minute
Flexibility
Vision-System erfasst variable Positionen von Pralinen und Blister
Efficiency
Exakte Steuerung mit integriertem Line Tracking
Connectivity
Vernetzung aller Systeme mit Highspeed Ethernet
Ausgangslage & Ziele
Die Delica AG gehört zur Migros Industrie und produziert unter anderem die FREY Schokoladenprodukte. Am Produktionsstandort Buchs befand sich eine in die Jahre gekommene Verpackungsanlage.
Mit Hilfe von elf Robotern wurden Pralinen in unterschiedliche Blister abgepackt. Nun sollten die bestehenden Scara Roboterzellen durch eine neue Anlage mit einer höheren Taktrate von bis zu 70 Pralinen pro Minute ersetzt werden.
Eine Herausforderung lag darin, dass sich sowohl das Zuführband der Pralinen als auch das Hauptband für den Blistertransport kontinuierlich bewegen. Die Pralinen müssen also dynamisch ab Band und in voller Fahrt im Blister positioniert werden. Eine weitere Vorgabe war die Integration der neuen Roboter in die bestehende Anlage.
Die Lösung
Neueste Roboter- und Vision-Technologie sowie eine Steuerung mit Line Tracking ermöglichen fliessende und sehr schnelle Zyklen.
Unsere Wahl fiel dazu auf Stäubli TS2-80 Scara Roboterzelle mit zweifachem Line Tracking sowie ein Cognex Vision-System. Das Blister-Transportband wie auch das Pralinenzuführband erhielten je einen Encoder.
Auf diese Weise können die Positionen von Blister und Pralinen genau verfolgt werden, während die hochauflösende Cognex-Kamera in der Lage ist, die Position der Pralinen schnell und exakt zu erkennen. Alle Systeme sind mit Highspeed Ethernet vernetzt, um die geforderte Taktrate gut zu erreichen.



Branche
Applications
Zeit für Ihr Projekt?
Lassen Sie uns über Ihr Automatisierungsprojekt sprechen. Ich freue mich auf Ihre Anfrage via E-Mail oder Telefon.

Nick Koch
CEO / Senior Automation Expert
Die Konzeption und der Bau der Zuführung/Greiftechnik forderten unser ganzes Engineering-Know-how. So war aufgrund der engen Platzverhältnisse ein cleveres Greifsystem nötig, um die Freiheitsgrade des Roboters optimal auszunutzen.