Case
Palletizing Chilled Salad Dressing Bottles
A powerful palletizing system ensures the palletizing of chilled salad dressing bottles at Bruno’s Best. This positions the family business optimally to handle growing order volumes effortlessly.
Highlights
Productivity
Automatic grouping and shrink packaging
Flexibility
Multifunction gripper, tool-free changeover
Efficiency
Compact, high-performance palletizing system
Connectivity
Integration into existing automation

Initial Situation & Goals
The salad dressings from Brunos are a success story. To continue delivering just-in-time and handle the ever-growing demand, the family business was looking for an automation solution for the palletizing process.
The goal of the project was a user-friendly, flexible, and powerful palletizing system with a pre-installed packer/shrink wrapper. The confined space conditions, however, posed a challenge. The new system should also match the quality and quantity of the upstream, already automated processes.
Other demanding key points were the cycle time, changing palletizing patterns, and different bottle sizes.
The Solution
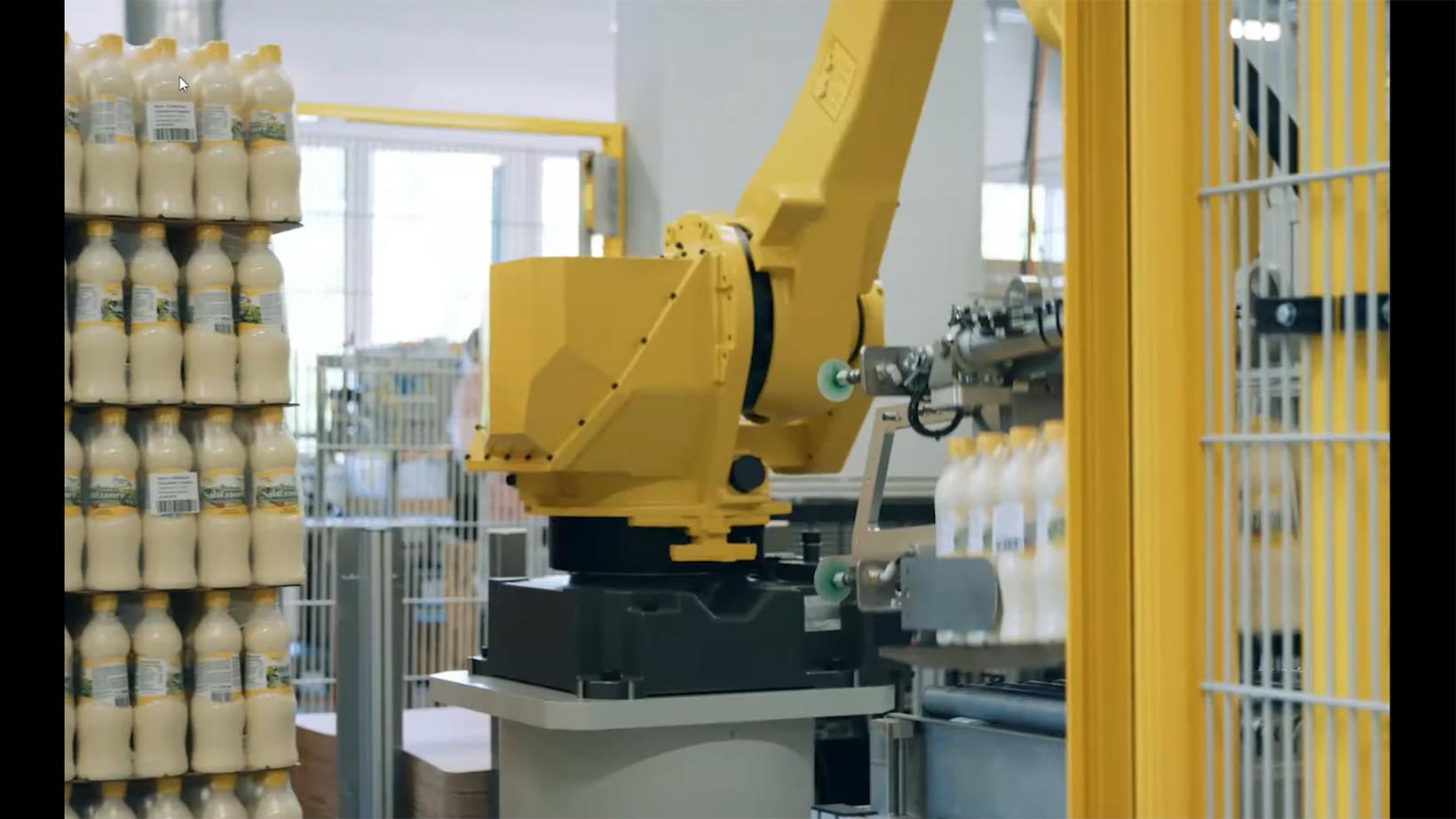
A powerful FANUC Industrial Robot with high payload capacity forms the heart of the new palletizing system. It performs the palletizing tasks at the desired cycle rate and fits perfectly into the limited space. A multifunctional gripper and tool-free changeover provide the desired flexibility of the system, which can be easily expanded with new palletizing patterns.
Each palletizing cycle starts with an empty Euro pallet. It is provided to the robot via a roller conveyor before it picks up a cardboard interlayer and begins stacking the packages. The individually filled bottles are automatically grouped, positioned, and packed/shrink-wrapped in units of 6, 10, and 12.
Depending on the layer pattern, the robot picks up one to four packages and forms a stable stack. After completing the palletizing scheme, the pallet is automatically transported out of the cell and then shrink-wrapped with protective film.
Industry
Applications
Time for Your Project?
Let's talk about your automation project. I look forward to your inquiry via email or phone.

Nick Koch
CEO / Senior Automation Expert
The design and construction of the feeding/gripping technology challenged all our engineering know-how. Due to the tight space constraints, a clever gripping system was necessary to optimally utilize the robot's degrees of freedom.